::产品概述::
Quantum3D LIDAR Fusion工具套件
LIDAR Fusion工具套件为用户提供可视化、调整、合并、纠正及分析LIDAR传感器点云数据的能力,并将点云自动转换至标准VISSIM格式如Shape和OpenFlight®的一个多边形合成环境数据库中。LIDAR Fusion工具套件产品由Quantum3D的子公司CG2所开发,建立在NAVAIR SBIR成功商业化的基础之上,后者旨在使LIDAR传感器数据成为VISSIM合成环境数据库的一个新来源。功能完善的最终产品有着广泛的范围,不仅满足了VISSIM市场的需求,而且还能为任务演练团队、地理空间情报界(GEOINT)、传感器开发人员及LIDAR数据提供者提供解决方案。

LIDAR Fusion工具套件包括四个主要组成部分:
LIDAR Fusion注册
为用户提供了纠正每次LIDAR扫描的位置和方向错误的能力。
LIDAR Fusion浏览器
一个GUI应用程序提供了点云数据的一个完整的3D可视化。图像可以点数据进行显示。
LIDAR Fusion注释器
系统的骨干。能够从统一的点云识别并分离地形皮肤,然后将剩余点集合为特征并进行功能分类(如建筑物)和子部分(如墙壁)。
LIDAR Fusion DBGS
采用LIDAR Fusion注释器创建的数据,并将其格式化为OpenFlight®,Shapefiles和相应的Bare Earth DEM文件。这些数据文件中的每一份均可导入传统的COTS DBGS工具中,如TERREX TerraVista,以生成可在大多数图像生成器上运行的产品模拟数据库。
应用
LIDAR工具套件采用模块化的设计,使产品得以解决各种客户需求:
传感器和传感器数据开发
点云数据可视化和编辑功能对于传感器数据提供者和传感器开发者(如Lockheed Martin公司的导弹和火控)是非常有用的,以评估新传感器在开发中的性能。

地理空间情报(GEOINT)
点云可视化的显示选项和分析功能可为地理情报界提供一种快速的方法以评估来自一次原始LIDAR点云扫描中的场景。
可视化仿真训练和任务演练
点云转换到VISSIM格式为仿真、培训以及任务演练提供了一个新的LIDAR数据源。能够快速生成特定地理IG场景内容,传统方法无法达到这一高效率。

特点与优点
点云数据的可视化
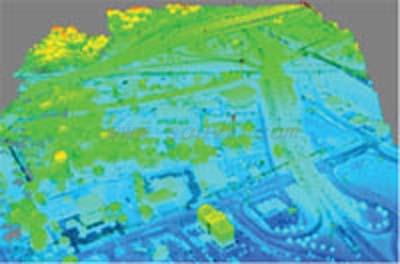
- 加载查看多个重叠的点云数据,包含数百万个点,并全3D环境中以真正的交互速度查看统一的结果。
- 采用各种质地、颜色和底纹选项增强点云场景。
点云编辑
- 校正点云扫描之间的地理空间定位误差
- 使用其他特定地理信息来源如卫星图像对齐统一的点云
- 过滤错误的数据点
点云分析
点云数据转换
::应用范围::
适用于传感器和传感器数据开发、地理空间情报、可视化仿真训练和任务演练等应用领域。
::技术特征::
::技术特征::
Quantum3D LIDAR Fusion介绍资料(中文版)
- 过程中自动识别、隔离,并突出显示点云内功能,包括地形、建筑物和树木。
- 过程中自动获取点数据内多边形表面的位置点云数据转换
- 将统一、经过分析后的点云数据输出为VISSIM标准格式(OpenFlight®,Shape,DEM)
- 这一完全自动化的转换过程可在几分钟之内采用成千上万的特定地理信息功能生成地形。自动过程中可以:
·隔离地形并填充特征被清除的全部间隙
· 构建精确的建筑模型,从相应的卫星/地区图像应用特定地理屋顶纹理,适用用户 选择的通用墙壁纹理。
· 将来自实际激光雷达扫描的树木根据其现实位置和大小进行规模和位置设定。 - 导出的数据输入兼容当下多数VISSIM图像生成器、数据库生成编辑器,以及DoD存档标准(SECORE,CDB,NPSI,SEDRIS)。
- 采用各种质地、颜色和底纹选项增强点云场景
- 提供可视化、调整、合并、纠正及分析LIDAR传感器点云数据的能力
- 为任务演练团队、地理空间情报界(GEOINT)、传感器开发人员及LIDAR数据提供者提供解决方案。


































































图像生成器")
图像生成器")









