::产品概述::
Intersense NavChip 商用IMU芯片
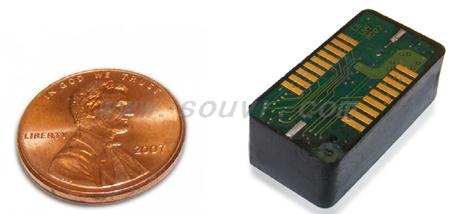
NavChipTM仅有一枚硬币的大小,却能通过采用突破性MEMS技术提供前所未有的低噪音和稳定性。作为业界首款商用IMU芯片,NavChip相比之前的商业级MEMS IMUs提供角度随机游走12倍的改善和运行中偏置稳定性6倍的提高。

NavChip将启用先进的惯性导航应用,包括之前仅限于大型军用车辆的GPS / INS组合,将部署至小型无人驾驶车辆,如无人机和机器人。NavChip还会在固定和移动应用中提供小型化摄像头和天线稳定系统。
NavChip特点
- 超小的6轴IMU
- 前所未有的陀螺仪和加速度计噪声和稳定性,适用于微型MEMS器件
- 低功耗
- 大动态范围
- 工厂校准和温度补偿
- 表面贴装,方便OEM集成
- 环氧树脂封装环境耐用性和长期稳定性

NavChip开发工具包
为简化NavChip验证和产品整合,Intersense提供了一个开发工具包,包括全套的IMU工具集。通过提供详细的文档、软件工具和简单的PC机接口,NavChip开发套件能够简化您的产品设计周期。

NavChip开发工具包的内容
- NavChip焊接至接口板。
- 2.5英寸的精磨评估立方体和接口板安装硬件用于NavChip测试。评估立方体还用于Intersense外部校准软件的验证
- 接口电缆连接到接口板(Molex接头连接USB,Molex接头连接RS-232 )
- NavChip产品光盘
1、 硬件诊断软件( HWDiags.exe )用于在所有3个轴测量、记录及显示ΔΘ和ΔV。HWDiags也将提供一个集成安装 NavChip的外部校准,并提供接口进行固件更新。
2、NavChip开发套件用户指南 – 关于设置、安装软件和测试NavChip一个简短教程。
3、 NavChip详细规格表(Intersense专有)。
4、接口板规格表。
5、NavChip接口控制文件。
::应用范围::
适用于动态仿真、训练和危机处理的应用等诸多领域。
::技术特征::
- 超小的6轴IMU
- 前所未有的陀螺仪和加速度计噪声和稳定性,适用于微型MEMS器件
- 低功耗
- 大动态范围
- 工厂校准和温度补偿
- 表面贴装,方便OEM集成
- 环氧树脂封装环境耐用性和长期稳定性
::产品规格::
| 规格 | Intersense NavChip 商用IMU芯片 |
NavChip典型性能数据(初步) |
| 输出格式: | 3V TTL UART和SPI |
| 默认信息格式: | 补偿ΔΘ,ΔV |
| 电源电压范围: | 3.25 - 5.5 V |
| 耗电量: | 120 mW |
| 工作温度范围: | -40 ºC到85 ºC |
| 输出数据速率: | 高达1000赫兹 |
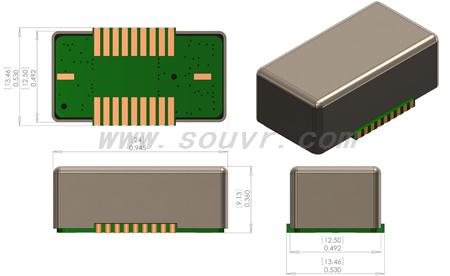
| 外形尺寸: | 12.00毫米x 23.25毫米x 7.75毫米 |
| RoHS标准: | 符合 |
| 角速率 |
| 速率范围 : | + / - 2000 º/s(+/- 35弧度/秒) |
| 角度随机游走: | 0.25 º/√小时 |
| 噪声密度: | 0.004 º/s /√Hz |
| 运行中偏置稳定性: | 12 º/hr |
| 带宽(-3 dB ): | 200赫兹 |
| 线性 +/- 300 º/s : | 0.1% |
| FS线性: | 0.5% |
| 线性加速度 |
| 加速度范围: | +/- 11 g |
| 随机游走速度: | 0.045 m/s/√hr |
| 噪声密度; | 70µg/√Hz |
| 运行中偏置稳定性: | 0.05毫克 |
| 带宽(-3 dB): | 200赫兹 |
| 线性 +/- 2g : | 0.1% |
| FS线性: | 1 % |
::下载资料::
Intersense-InertiaCube3无线位置追踪器规格介绍资料(英文)

























































惯性位置追踪器")

")
")

")
惯性位置追踪器")
")
")

")
")
")
")

