::产品概述::
产品用途
一款小巧的商务研究工具,可为用户的产品和研究设备添加触觉功能。
产品简介
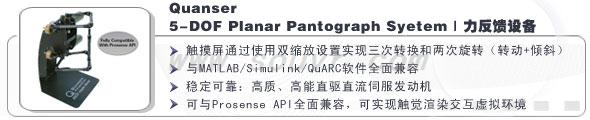
Quanser公司开发的5自由度“触觉棒”是一款创新的触觉设备。该设备由英国哥伦比亚大学的缇姆•萨尔库迪恩(Tim Salcudean)教授研制发明,起初用于触觉技术的研究,之后Quanser公司将冗余控制机器人的性能进一步提升,并将其转化为一款功能强大的商业化产品。触摸屏为5自由度设计,通过使用双缩放设置实现三次转换和两次旋转(转动+倾斜)。每个缩放仪由三台DC发动机直接驱动,其中两台位于肩部,另一台功率更强的直流发电机位于腰部。控制棒的顶端受动器通过通用接口与每个缩放器的两头连接。

棒轴(5自由度)周围的偏转为被动式无限偏转,使用者握把更为舒适。该设备由轻质材料制成,并在腰部连接有两个助动器,从而进一步降低了棒体的重量。
六台发动机的电能通过Quanser的QPA线性功放器进行传送,发动机轴的位置由高分辨率光学译码器进行测量。该系统可与PC机相连,并使用Quanser的Q8高性能硬体回路控制面板进行控制。系统开放式结构设计允许用户运行其希望运行的任何控制法则。两个触觉棒缩放仪由前后两个Q8控制面板进行主/副驱动。

该产品配有Quanser公司灵活的QuARC软件和应用样本,可通过MATLAB/Simulink对系统进行实时控制。Q8软件工具包内配有驱动器,用户可以在自己特定的平台上开发自己的控制器。
使用虚拟现实工具盒创建触觉应用。
主要功能
优化的触摸屏设计
- 与MATLAB/Simulink/QuARC软件全面兼容
- 无异常操作
- 最大化力同向性:均匀力
- 可与使用者手掌完全贴合
稳定可靠
- 高质、高能直驱直流伺服发动机
- 高分辨率正交光学译码器可探测系统位置
- 耐用、科学的内部构造设计
- 紧急关闭安全开关
- 功放器过热保护
功能全面
- 开放式架构系统,全部备有证明文件
- 覆盖多领域触觉应用
兼容性能
- 可与Prosense API全面兼容,可实现触觉渲染交互虚拟环境
- 可与MATLAB/Simulink/ WinCon软件全面兼容
::应用范围::
适用于触觉技术研究、商业化科研、机器人技术和运动学等领域。
::技术特征::
- 与MATLAB/Simulink/QuARC软件全面兼容
- 无异常操作
- 最大化力同向性:均匀力
- 可与使用者手掌完全贴合
- 高质、高能直驱直流伺服发动机
- 高分辨率正交光学译码器可探测系统位置
- 耐用、科学的内部构造设计
- 紧急关闭安全开关
- 功放器过热保护
- 开放式架构系统,全部备有证明文件
- 覆盖多领域触觉应用
- 可与Prosense API全面兼容,可实现触觉渲染交互虚拟环境
- 可与MATLAB/Simulink/ WinCon软件全面兼容
::产品规格::
| 规格 | Quanser 5-DOF Planar Pantograph Syetem 力反馈装置 |
| 发动机 | 最高功率: | 200瓦 |
| 扭距常值: | 0.11 N.m |
| 扭距峰值: | 0.37N.m |
| 扭距常数: | 0.0525 N.m/A |
| 线性功放器(各) | 功率: | 300瓦 |
| 电流常值: | 7安 |
| 电流峰值: | 10安 |
| 内置供电(各) | 电压: | 30伏 直流 |
| 电源: | 600瓦 |
译码器(各) | 分辨率: | 20,000计数/转速 |
| 几何外形 | 前臂: | 195毫米 |
| 发动机臂: | 144毫米 |
| 顶端受力 –标称位置: | Fx(N) / 峰值Fy (N) / 峰值Tz (N.mm) – 峰值7.7 / 7.0 / 9.0 |
| 力反馈工作区: | x(毫米)/y(毫米)/z(毫米)±240/85-335/-215-235 |
::下载资料::
中文版 5 DOF - Product Information Sheet