::产品概述::
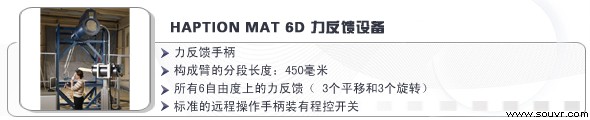
HAPTION MAT 6D 力反馈设备
MAT 6D为新一代的力反馈遥操作主臂
其简单的串行架构与远程驱动提供了轻质、修长的设计,特别适合经验丰富的操作人员的习惯。

MAT 6D (Telerobotics主臂)为一款6自由度触觉装置或“主臂”,配备一个力反馈手柄。专为在恶劣环境下的机械臂远程操作而设计。
借助其嵌入式直角力控制和奇点的存在,该设备能够用于特种从动臂运动学当中。操作者凭借力反馈技术可准确控制远程操纵器施加的力,从而降低了工具损坏和环境破坏的风险。
Mat 6D可极其轻松地集成在一个虚拟现实环境中,便于进行操作者训练和任务规划。

技术特点
MAT 6D是当下市场中唯一的一款力反馈系统,提供如下特点:
• 所有6自由度上的力反馈( 3个平移和3个旋转)
• 力反馈手柄
• 操作工作空间对应于一个人体手臂的动作
• 构成臂的分段长度:450毫米
• 最大力度为35N(确保 40厘米大小的一个立方体)
• 最大旋转扭矩为3Nm(确保 40厘米大小的一个立方体)
• 标准的远程操作手柄装有程控开关
• 高度可靠的动力传输系统(滚珠螺杆)
• 机械支持高度可调(可选液压助力)
• 重量仅34公斤,可不使用特定设备实现运输
• 主操作系统提供开发工具包(API)
• 证明与目前市场上的主流应用软件的兼容性,使用专用插件:VortexTM、HavokTM、ODE、 VirtoolsTM、CatiaTM V5、OpenMask等。
• 兼容远程操作软件TAO2000 TM V2
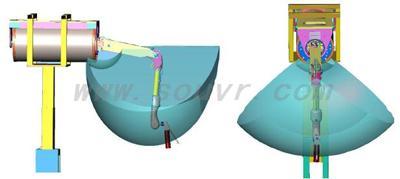
设备工作区
MAT 6D由两个主要的铰接段组成,固定在一个旋转底座上。第二段末端与一个铰接腕相连,可绕三个交叉轴转动。由此,触觉接口是一个6自由度的移动设备,在所有方向上提供力反馈。MAT 6D具有足够大的工作区,以包含一个40厘米大小的立方体。平移位置分辨率为0.02毫米,旋转弧度为1e- 4。
详细规范
| 轴nb | 间隙(°) | 连续扭矩 (N.m) | 最大扭矩 (N.m) | 最大力(N) |
| 1 | 69 | 29Nm | 90 Nm | 180 N |
| 2 | 73 | 22 Nm | 66 Nm | 132 N |
| 3 | 109 | 26 Nm | 78 Nm | 156 N |
| 4 | 326 | 4 Nm | 12 Nm | 24 N |
| 5 | 210 | 4 Nm | 12 Nm | 24 N |
| 6 | 510 | 4 Nm | 12 Nm | 24 N |
::产品规格::
| 规格 | HAPTION MAT 6D 力反馈设备 |
| 传输线的最大力: | 70 N |
传输线的连续力: | 30 N |
| 旋转连续扭矩: | 4 N.m |
| 重量平衡: | 静态部分(机械,弹簧) |
| 按钮数目: | 6 个(1个离合器, 5个特定应用) |
| 工具变换器: | 不提供 |
::应用范围::
适用于虚拟现实、项目审查、人机工程学分析、功能测试、装配/拆卸、工作环境仿真、操作人员培训、医疗培训、远程外科手术等诸多领域
::技术特征::
•所有6自由度上的力反馈( 3个平移和3个旋转)
•力反馈手柄
•操作工作空间对应于一个人体手臂的动作
•构成臂的分段长度:450毫米
•最大力度为35N(确保 40厘米大小的一个立方体)
•最大旋转扭矩为3Nm(确保 40厘米大小的一个立方体)
•标准的远程操作手柄装有程控开关
•高度可靠的动力传输系统(滚珠螺杆)
•机械支持高度可调(可选液压助力)
•重量仅34公斤,可不使用特定设备实现运输
•主操作系统提供开发工具包(API)
•证明与目前市场上的主流应用软件的兼容性,使用专用插件:VortexTM、HavokTM、ODE、 VirtoolsTM、CatiaTM V5、OpenMask等。
•兼容远程操作软件TAO2000 TM V2
::下载资料::
HAPTION MAT 6D 力反馈设备中文版